Tech
What is fearmaxxing? Experts question the self-improvement trend
Fearmaxxing, a viral self-improvement trend that encourages people to confront their biggest fears, is gaining traction online, but experts warn that treating fear as a universal signal for action can lead to impulsive decisions and costly mistakes.
Read more about What is fearmaxxing? Experts question the self-improvement trend
Windows hibernation may contribute to SSD wear as storage costs rise
Experts are warning that a common Windows feature – hibernation – could be quietly increasing wear on SSDs, at a time when storage prices are rising sharply, and replacements are becoming significantly more expensive.
Read more about Windows hibernation may contribute to SSD wear as storage costs rise
Digital euro gains support as Europe seeks payment independence from the US
The European Central Bank secured key parliamentary backing on Tuesday for the launch of a digital euro, an electronic means of payments aimed at making the euro zone less reliant on US credit cards at a time of fraying transatlantic relationships.
Read more about Digital euro gains support as Europe seeks payment independence from the US

Tensions brew over use of Palantir software in Germany
A coalition party in the state of North Rhine-Westphalia wants law enforcement to ditch Palantir’s software, sparking tensions within the ruling coalition.
Read more about Tensions brew over use of Palantir software in Germany
Microsoft confirms Recycle Bin bug in Windows 10 and 11: a patch is on the way
Microsoft has acknowledged that a new Windows bug is causing issues with the desktop Recycle Bin. The Redmond-based tech company is currently working on a patch to fix the issue.
Read more about Microsoft confirms Recycle Bin bug in Windows 10 and 11: a patch is on the way
Bankruptcy, trademark wars, and digital detox: How did Commodore live through it all?
Commodore’s new retro flip phone, the Callback 8020, is actually a product of a company with a 70-year history.
Read more about Bankruptcy, trademark wars, and digital detox: How did Commodore live through it all?

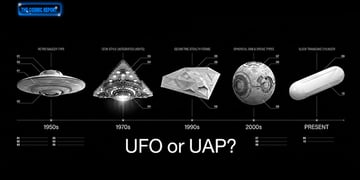
Spielberg on the “UFO” term, Loeb on humans as probes, and SpaceX shares wobble
This week, The Cosmic Report rounds up Steven Spielberg's insistence on using the “UFO” lexicon, an Avi Loeb talk on humans as probes for aliens, and pivots to SpaceX’s first week on the stock exchange.
Read more about Spielberg on the “UFO” term, Loeb on humans as probes, and SpaceX shares wobble
Have you experienced any of these Android 17 bugs?
Just a few days after rolling out Android 17, users are already reporting issues, including unresponsive WiFi connections and missing widgets.
Read more about Have you experienced any of these Android 17 bugs?

Durov loses court challenge as India upholds temporary Telegram ban over exam leak
Telegram on Friday lost its bid to overturn an Indian government order temporarily banning the messaging app, with a New Delhi court ruling that the government's actions, aimed at preserving the integrity of a key med school exam, were legal and reasonable.
Read more about Durov loses court challenge as India upholds temporary Telegram ban over exam leak

Germany would rather accept weaker cloud services than depend on US providers
German companies are increasingly concerned about being overreliant on American tech. The latest figures show that a growing number of businesses would rather store their data on a national cloud system and even compromise some services and lower prices to avoid providers from abroad, particularly the US.
Read more about Germany would rather accept weaker cloud services than depend on US providers

Dutch regulators say Tesla’s self-driving system was approved after independent testing and verified real-world data
The Dutch vehicle authority RDW says its approval of Tesla’s self-driving system was based on its own independent testing, expert review, and real-world driving data. It says the decision was not based only on information from Tesla, but on a broader assessment across extensive testing in varied conditions.
Read more about Dutch regulators say Tesla’s self-driving system was approved after independent testing and verified real-world data

Firefox shares roadmap as it loses users at an alarming rate
Mozilla's latest Firefox overhaul promises everything from built-in VPNs to AI-powered tools, yet the browser continues to lose users at an alarming rate. The question is no longer whether Firefox can innovate, but whether anyone is still paying attention.
Read more about Firefox shares roadmap as it loses users at an alarming rate

Revolut customer awarded compensation for notifications that ruined his sleep
A tired customer reported his bank, Revolut, to the UK's financial regulator for sending him push communications while he was asleep which, he claimed, led to a tough time at the office the following day.
Read more about Revolut customer awarded compensation for notifications that ruined his sleep

EC won’t save dying games despite 1.3M signatures, puts IP rights over players
Despite 1.3 million gamers’ signatures behind the “Stop Destroying Videogames” initiative, the European Commission (EC) ruled it “would not be proportionate” to require publishers to keep games playable after support ends, citing intellectual property rights as the main reason. Campaigners hope to find more support in the European Parliament (EP) instead.
Read more about EC won’t save dying games despite 1.3M signatures, puts IP rights over players

Can Snap replace the smartphone? New $2,195 Specs say yes
Snap on Tuesday launched its first augmented-reality glasses for consumers at a hefty price of $2,195, pitching the device as the future of how people interact with technology in the AI age.
Read more about Can Snap replace the smartphone? New $2,195 Specs say yes

Europe warns it could be cut off from US AI at any moment
Europe’s reliance on US artificial intelligence is under added scrutiny this week, with policymakers warning that access to critical AI systems could be cut off or restricted on political grounds. The issue has dominated discussion at the G7 in France and VivaTech in Paris following new US controls on advanced AI models.
Read more about Europe warns it could be cut off from US AI at any moment

Is your smartphone eligible for the Android 17 update?
Google has started the rollout with Pixel devices.
Read more about Is your smartphone eligible for the Android 17 update?

Durov erupts over India Telegram ban, calls it unfair after medical exam leaks
Messaging app Telegram has filed a petition in court that seeks to lift a temporary government order in India blocking access to the platform. The restriction was introduced to stop cheating in medical entrance exams, but Pavel Durov, Telegram’s founder, claims the platform was unfairly singled out.
Read more about Durov erupts over India Telegram ban, calls it unfair after medical exam leaks

Commodore releases $500 Linux-based phone that doesn't support Slack or Instagram
The new Linux-based flip phone won’t let you scroll your Instagram feed or check Slack notifications, but it will send messages on WhatsApp.
Read more about Commodore releases $500 Linux-based phone that doesn't support Slack or Instagram

France's spy agency drops Palantir for local alternative, says it can't rely on foreign powers
The French domestic intelligence agency DGSI has decided to terminate its contract with the US tech firm Palantir in favour of a French rival, ChapsVision, Prime Minister Sebastien Lecornu said on Tuesday.
Read more about France's spy agency drops Palantir for local alternative, says it can't rely on foreign powers
